
參賽團隊:智合科技
提案動機
隨著 5G 及車聯網發展,物流業主需要更具智慧的管理物流駕駛的系統,現行市場中仍處於安裝行車記錄器來進行事後究責,無法達到事前預警及駕駛行為有效的改善。本提案透過兩支攝影機(車前影像及駕駛畫面)進行在線影像分析,使用高效AI運算主機(HPC)分析車前狀況及駕駛行為,當發生異常事件後,進行即時告警,並進行事件錄影,透過4G/5G網路提供管理者查閱,讓管理者隨時檢視行車狀態(例如跟車過近或行人追撞危險),即時發現並修正駕駛行為異常(例如分心)。
其用途為:
1. 保障駕駛安全
2. 透過駕駛行為智能分析來修正駕駛行為,以保護用路人安全
解決方案
本系統特別適合應用於 運輸業 的駕駛管理,我們使用:
1. 研陽科技 UP Xtreme i11 Edge Computer 及 NCS2 神經棒來提供高效能的 AI 運算
2. 使用二支 Webcam 擷取車前及駕駛影像,其中車前影像進行人車物件偵測及追蹤,稱為 ADAS;車內影像進行駕駛人臉識別 [5]及頭部姿態角追蹤 [2],稱為 DMS
3. 當系統偵測到 駕駛行為異常時,會即時提出警示,並進行後端錄影
4. 車隊管理者可以透過 4G/5G 路由連入檢測駕駛行為 異常狀況,可做駕駛行為評分依據。
在開發過程中所用軟硬體如下:
硬體:

軟體:

1. 系統架構-開發硬體平台:UP Xtreme i11 EDGE+ Intel® NCS2 + Webcam x2 + 路由器
本系統由兩支Webcam擷取車前及駕駛座影像,至車聯網AI平台並將影像分流至OpenVINO平台進行AI inference,並將異常事件上傳至駕駛監控平台,業主能透過駕駛監控平台得知目前駕駛狀態。(圖一所示)
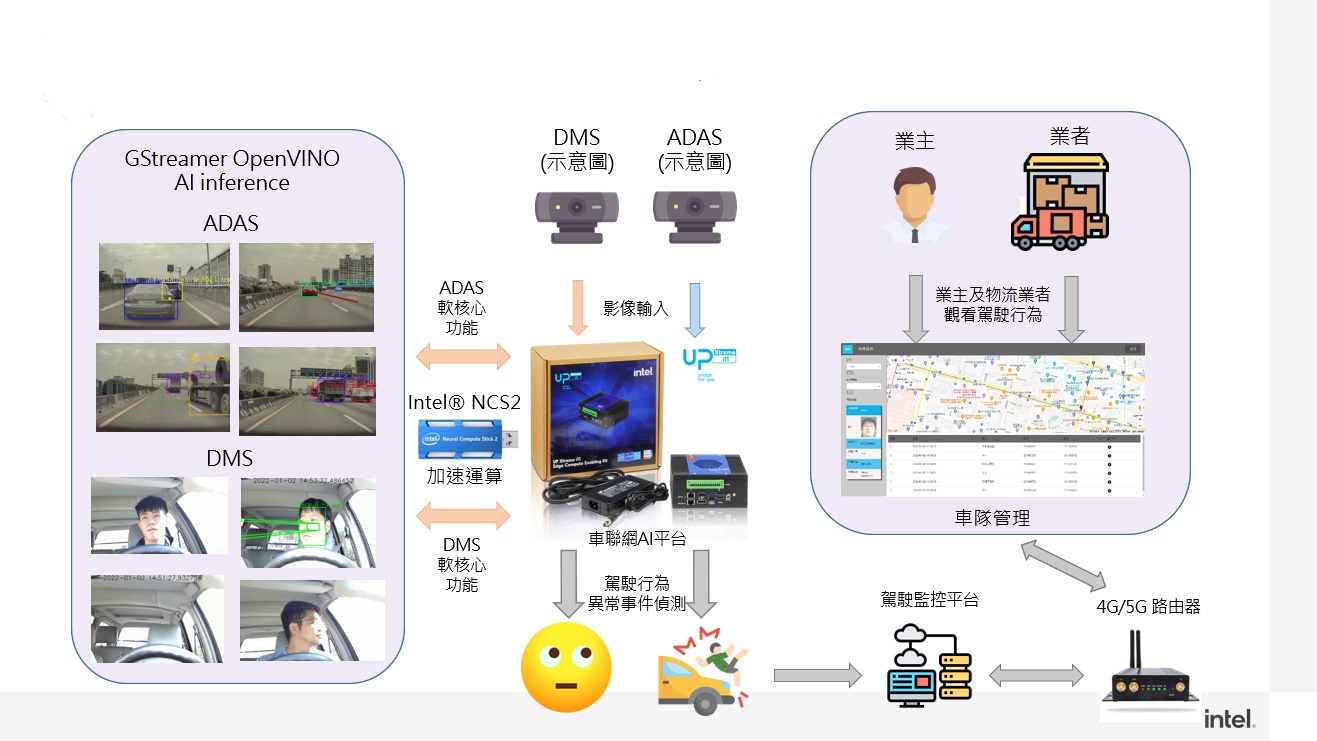 (圖一)系統架構
(圖一)系統架構
2. 技術架構-OpenVINO GStreamer [4]
在串流處理,我們採用 OpenVINO 平台搭配 GStreamer 及 OpenCV 方式進行。
AI 順向使用 OpenVINO 預訓練模型 [1],主要有三類:
1. 車前物件偵測及屬性識別
2. 人臉檢測及頭部姿態角追蹤
3. 人臉識別
影像輸入,可透過 Web Camera 或 檔案方式輸入,Inference 後的影像輸出到二路 V4L2 裝置 [3]
使用 GStreamer 連接 ADAS 及 DMS 所需的預訓練模型(由OpenVINO提供),將 Inference 後的結果,由 MQTT 傳至團隊開發的 AI 智能駕駛行為分析程式進行分析,使用 OpenCV 進行 online 貼圖,並將駕使行為異常結果儲存於資料庫,管理者可透過 本團隊開發之駕駛監控平台進行異常事件的檢索。(圖二所示)
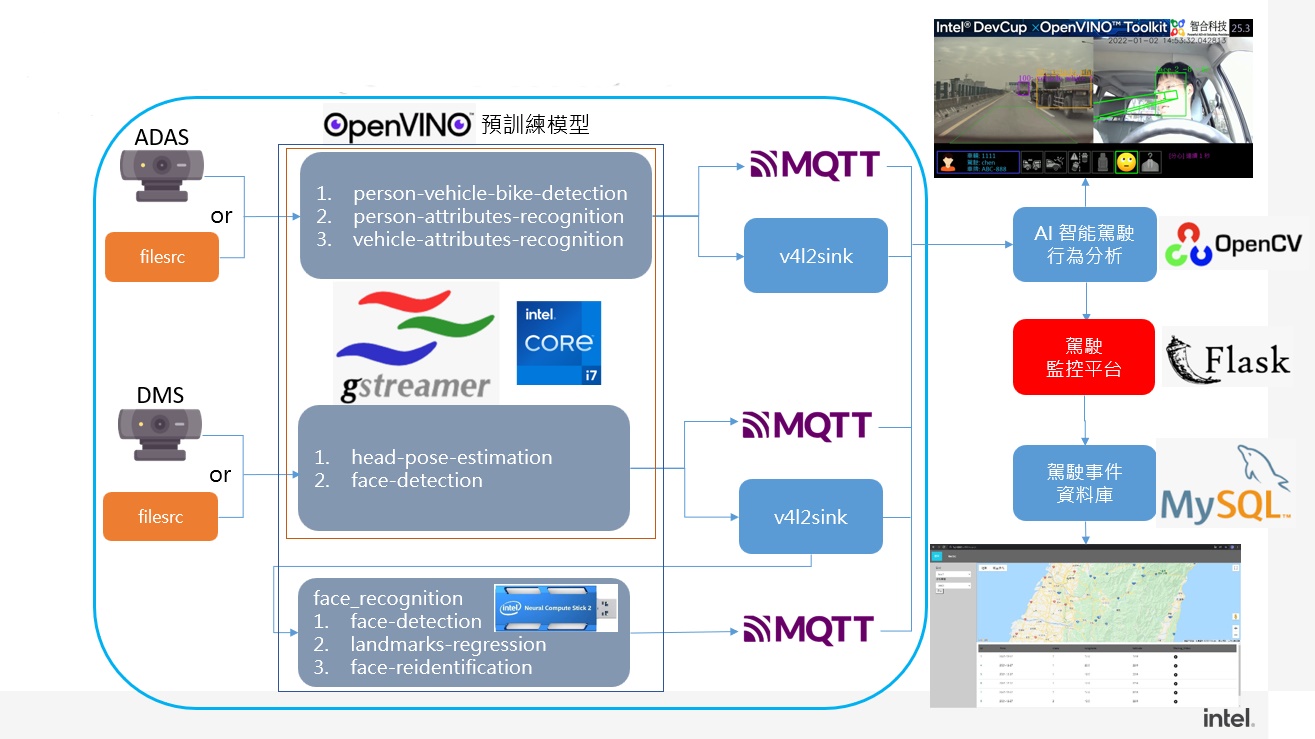
(圖二)技術架構
3. ADAS Pipeline
圖三為 GStreamer 連接 OpenVINO Model(人、車、自行車辨識)、(人物屬性辨識)、(車輛屬性辨識)之 ADAS Pipeline:
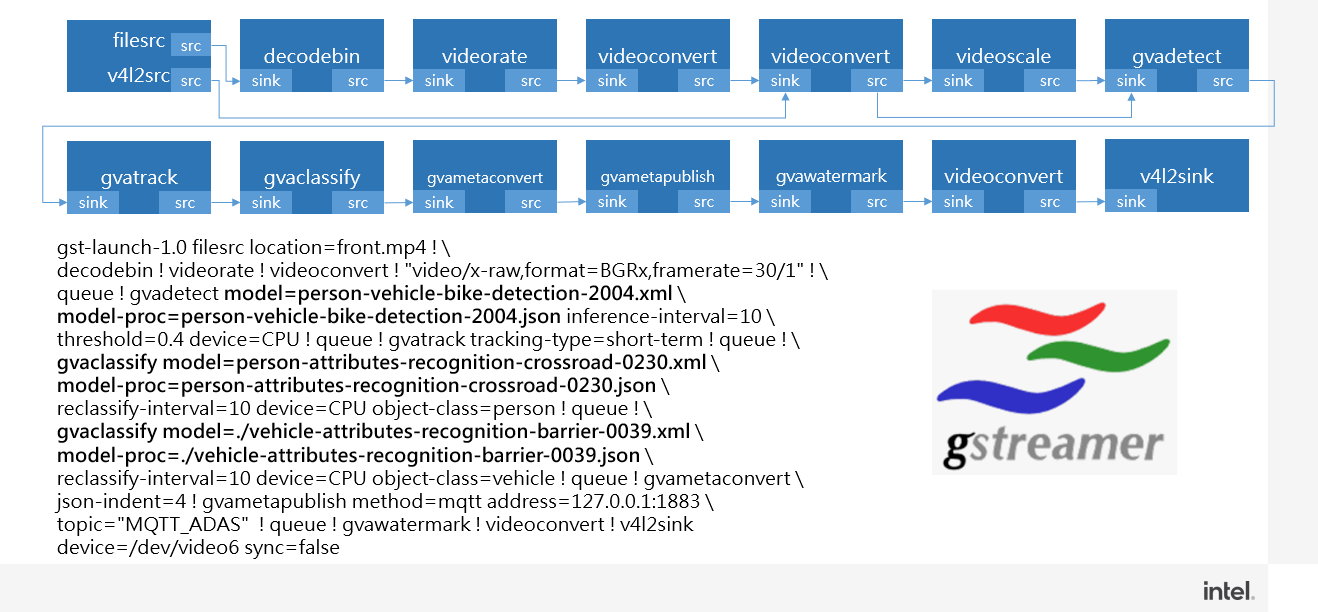
(圖三)ADAS Pipeline
4. DMS Pipeline
圖四為 GStreamer 連接 OpenVINO Model(頭部姿態角辨識)、(人臉辨識)之DMS Pipeline:
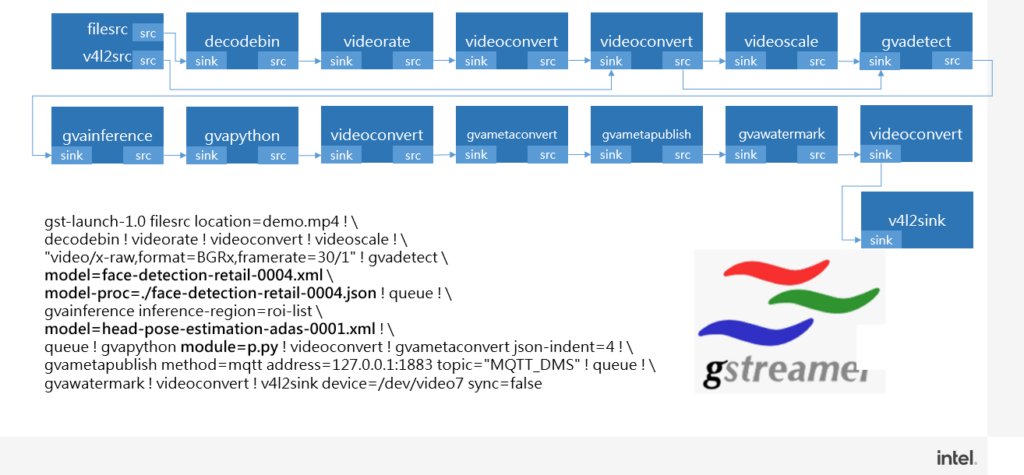
(圖四)DMS Pipeline
成果介紹短片
成果介紹
1. 安裝模擬場景

(圖五)模擬場景
2. ADAS 與 DMS 功能介紹及觸發條件
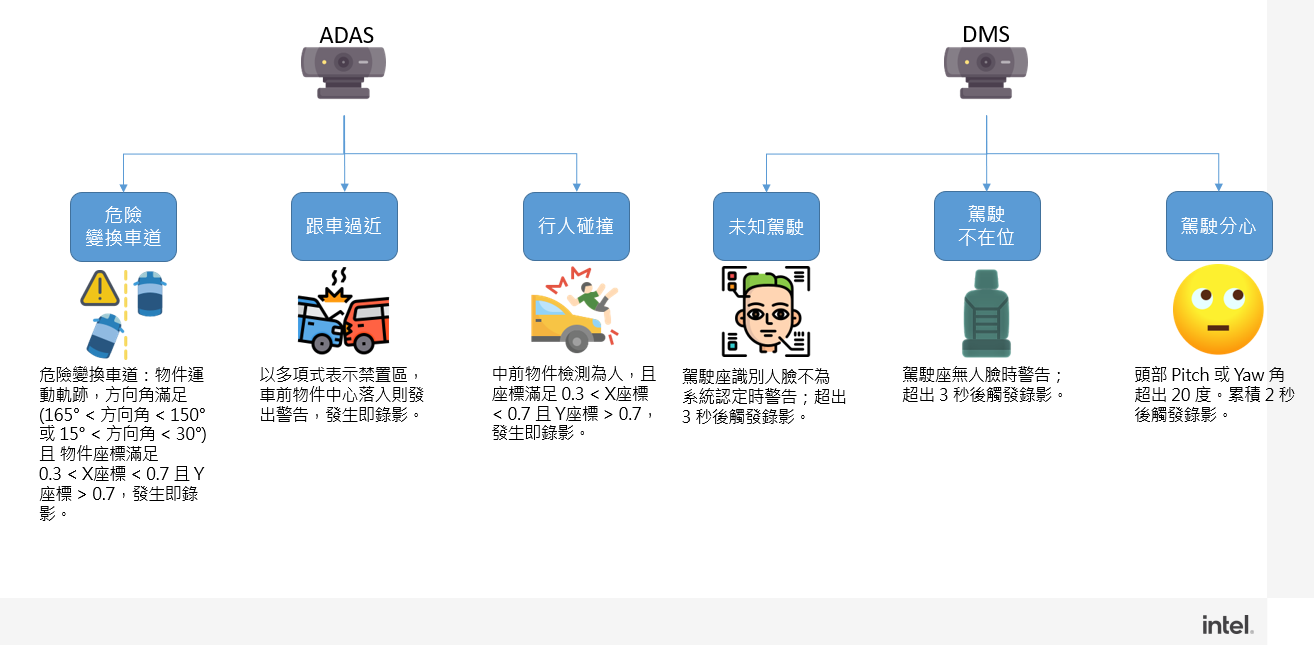
(圖六)功能介紹
3. 車機畫面及駕駛監控平台 – 展示說明
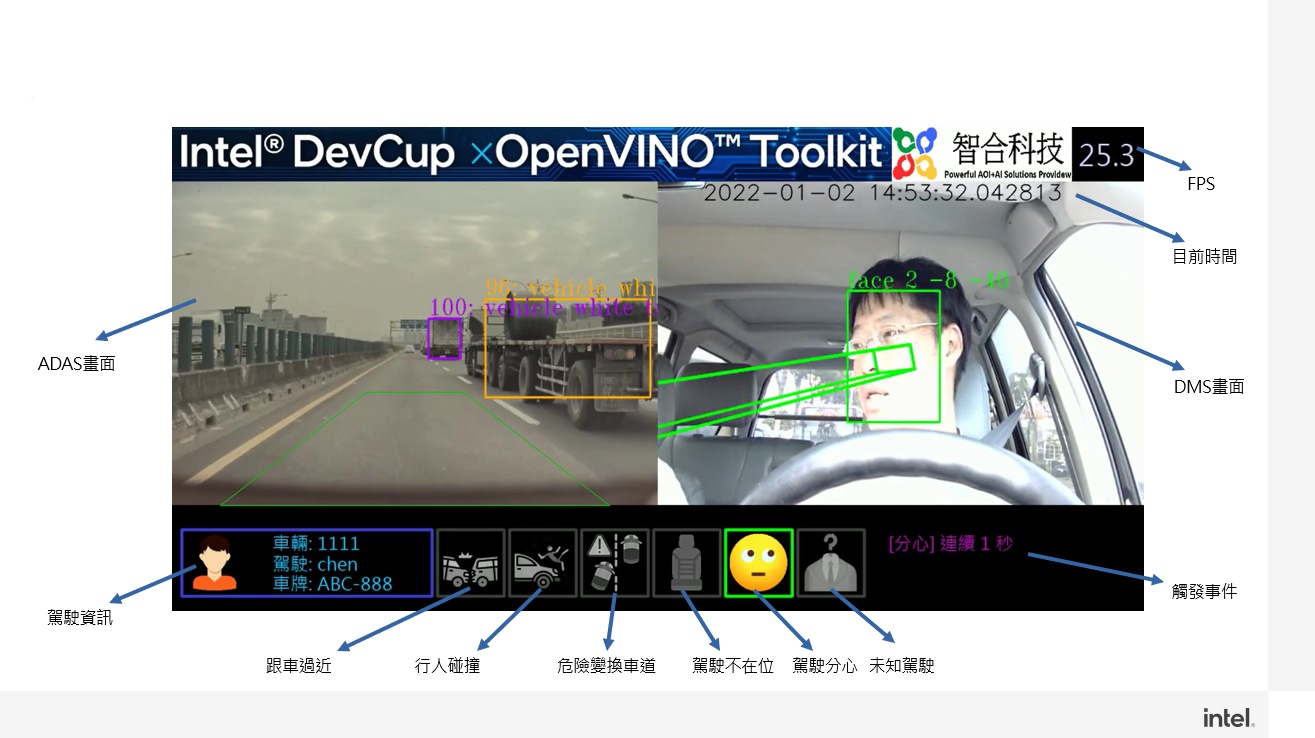
(圖七)車機畫面介紹

(圖八)駕駛監控平台操作步驟
4. 各項Model使用CPU及VPU效能表現
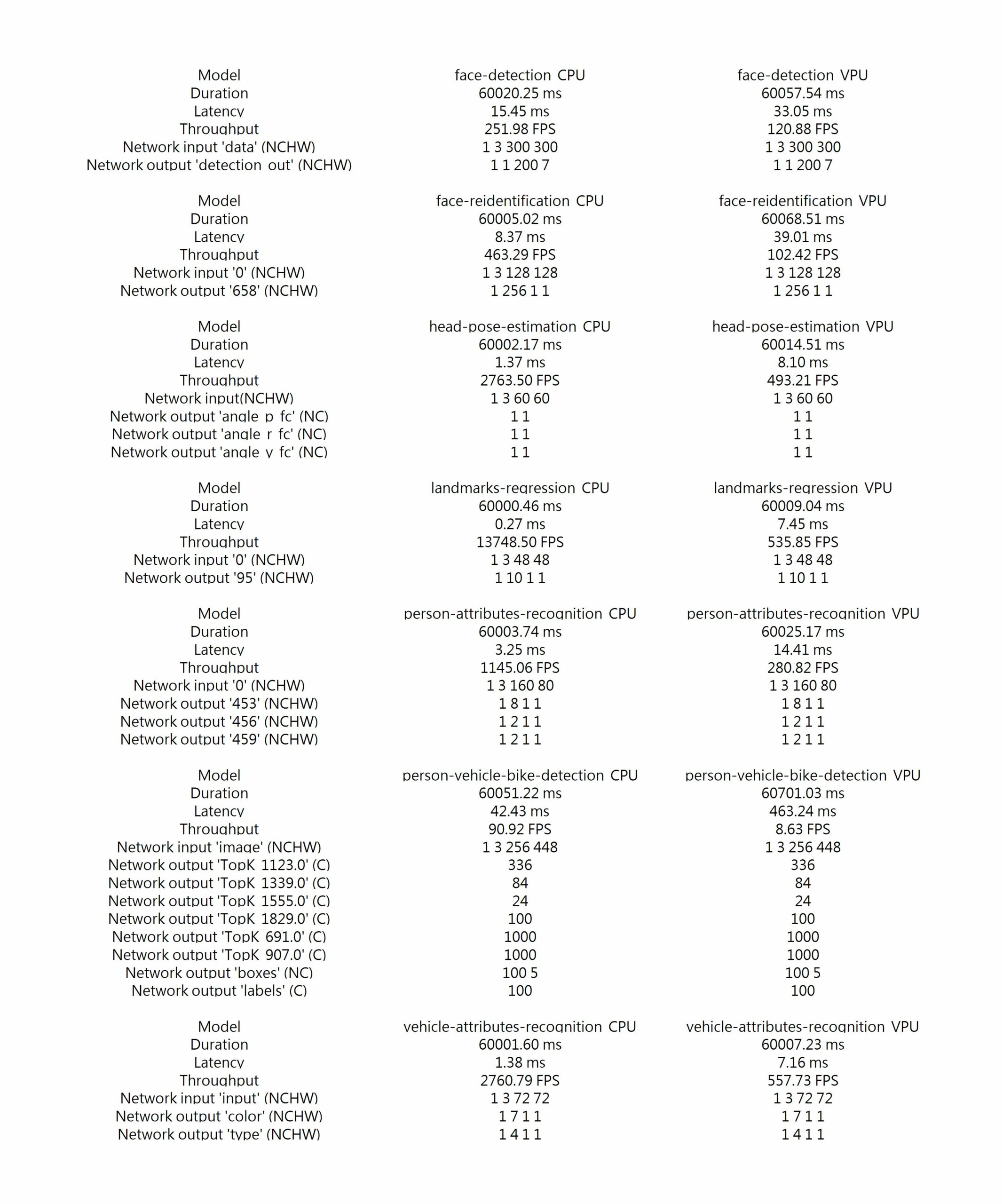
(圖九)Model使用CPU及VPU效能
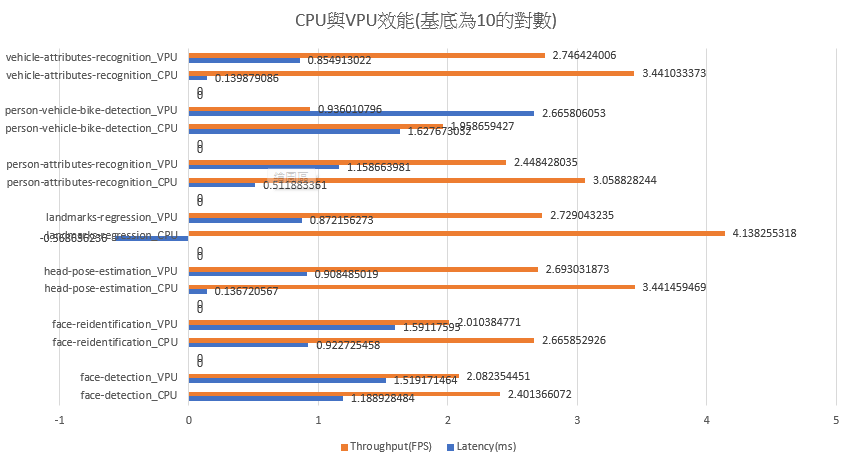
(圖十)使用 CPU 及VPU 效能圖表 (因值域差異大,以 Log10 對數表示)

(圖十一)裝置工作詳細內容
以下概略說明主要硬體的使用方式及整合後系統效能的表現,其中CPU 佔比最高,功能包含:
1. 負責兩項 AI 功能:車前物件偵測與追蹤,及駕駛頭部姿態角
2. 應用端的邏輯及 online OSD 貼圖
3. 網頁伺服器及資料庫
GPU 提供車機影像的顯示,NCS2 神經棒負責第三個AI的功能:人臉偵測與識別。
輸入資料量為兩隻 Web Camera 攝影機,其解析度為 752×416@30 FPS,整合後的系統效能,張數大約落在 15~25 張。
本系統能即時分析輔助駕駛並讓業主了解駕駛行為表現,可以進行員工教育,提升駕駛素質,保障駕駛及用路人的生命安全。