
參賽團隊名稱:MAXAIOT
本系統可以利用監理站考場攝影機設備,當考生進入各個考試關卡時,進行擺頭偵測,並依據各個關卡的擺頭標準,提供文字,如:通過/不通過以及影片來輔助考官進行判斷。
提案動機
在機車路考考試中,因為忘了擺頭而導致路試成績被扣的考生竟然佔了 2 成以上甚至快接近 6 成,此外因擺頭與否所引起的扣分爭議也時有所聞,如最近的媒體焦點「考照擺頭不明顯被扣分報復性擺頭 8 次」等新聞事件,皆足以說明在路考中如何降低擺頭扣分爭議為另一個重要的課題。
軟硬體資訊
硬體:
- EPC-TGU(Intel® Core™ i7-1185G7E 處理器)
- 監理站考場攝影機 x6
軟體:
- Intel OpenVINO Toolkit 2022.1
- Python
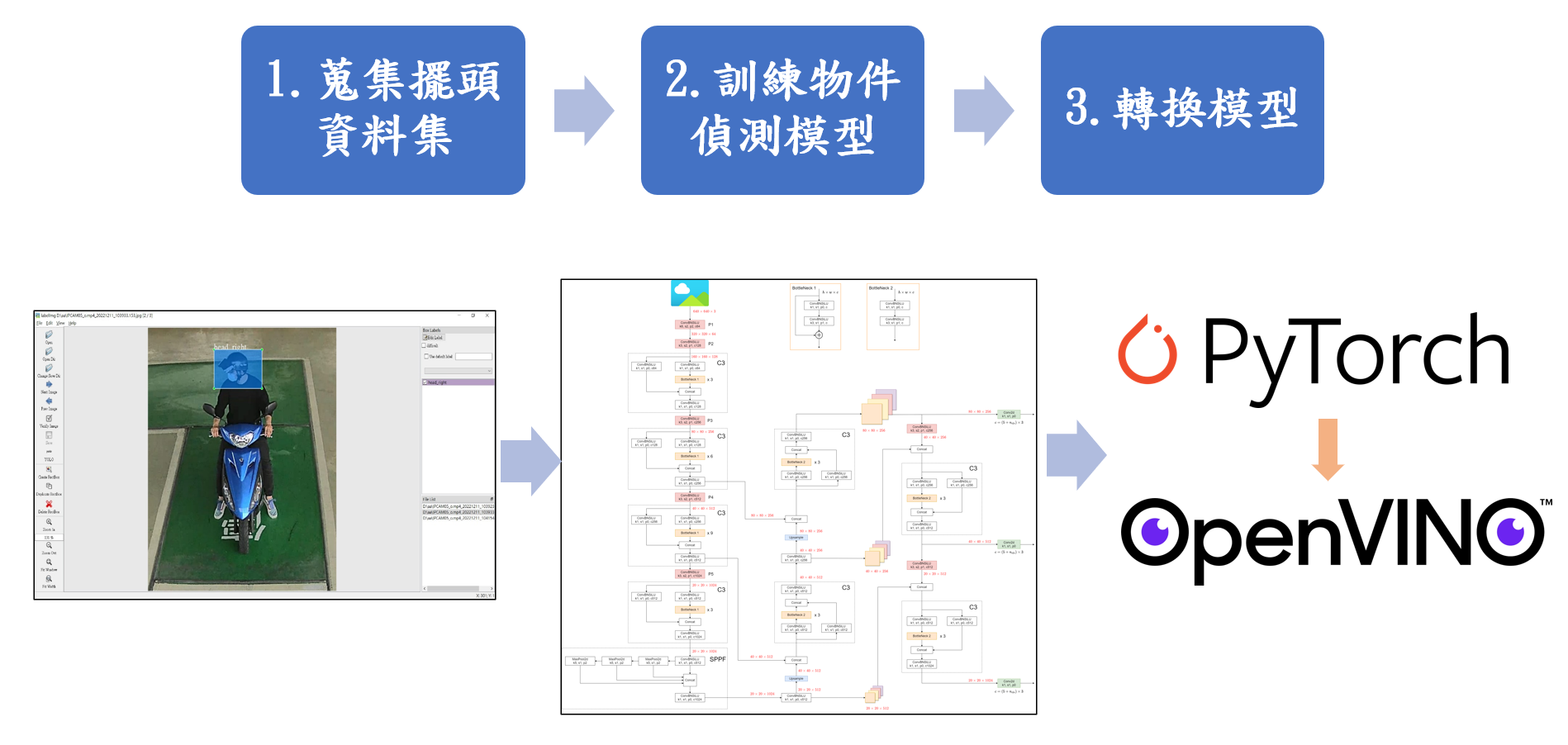
本系統開發流程
-
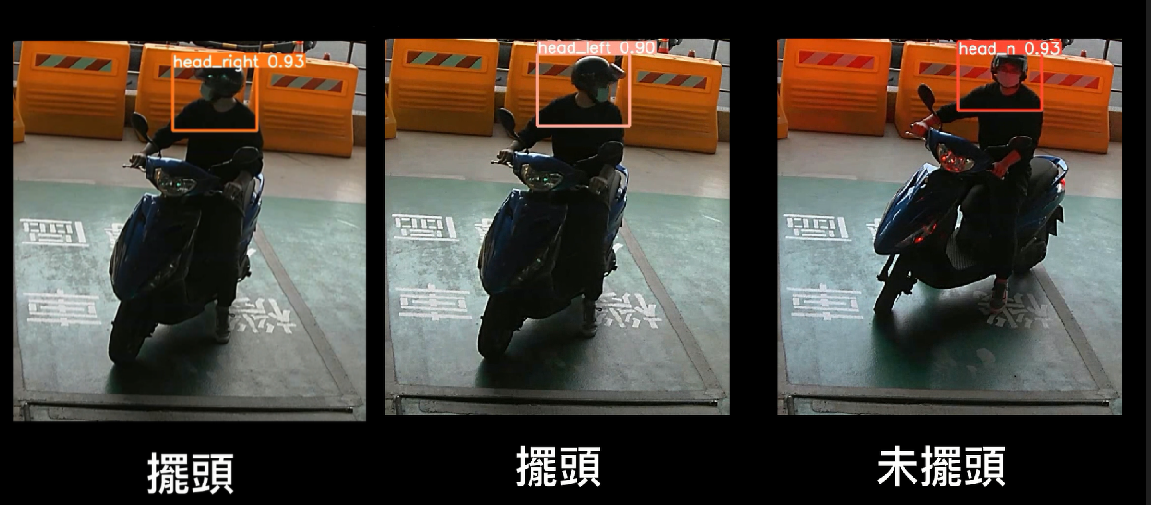
- 蒐集擺頭資料集:將資料標籤分為head_n (沒擺頭)、head_left (左擺頭)以及head_right (右擺頭)三類。並使用LabelImg標註訓練照片。如下圖所示,非實際訓練圖片。(肖像權疑慮,無法展示實際訓練圖片)
沒擺頭 右擺頭 左擺頭 

- 訓練物件偵測模型:選用YOLOv5當作偵測擺頭的模型,採Pytorch訓練,其訓練圖片大小為 640x640x3。
- 轉換模型:將Pytorch權重轉為OpenVINO IR權重。
- 蒐集擺頭資料集:將資料標籤分為head_n (沒擺頭)、head_left (左擺頭)以及head_right (右擺頭)三類。並使用LabelImg標註訓練照片。如下圖所示,非實際訓練圖片。(肖像權疑慮,無法展示實際訓練圖片)
成果介紹
驗證訓練完的YOLOv5模型,由混淆矩陣可以觀察到模型在右擺頭、左擺頭以及沒擺頭三個類別的表現相當優異,平均都達到92%以上的準確率。
驗證圖片:
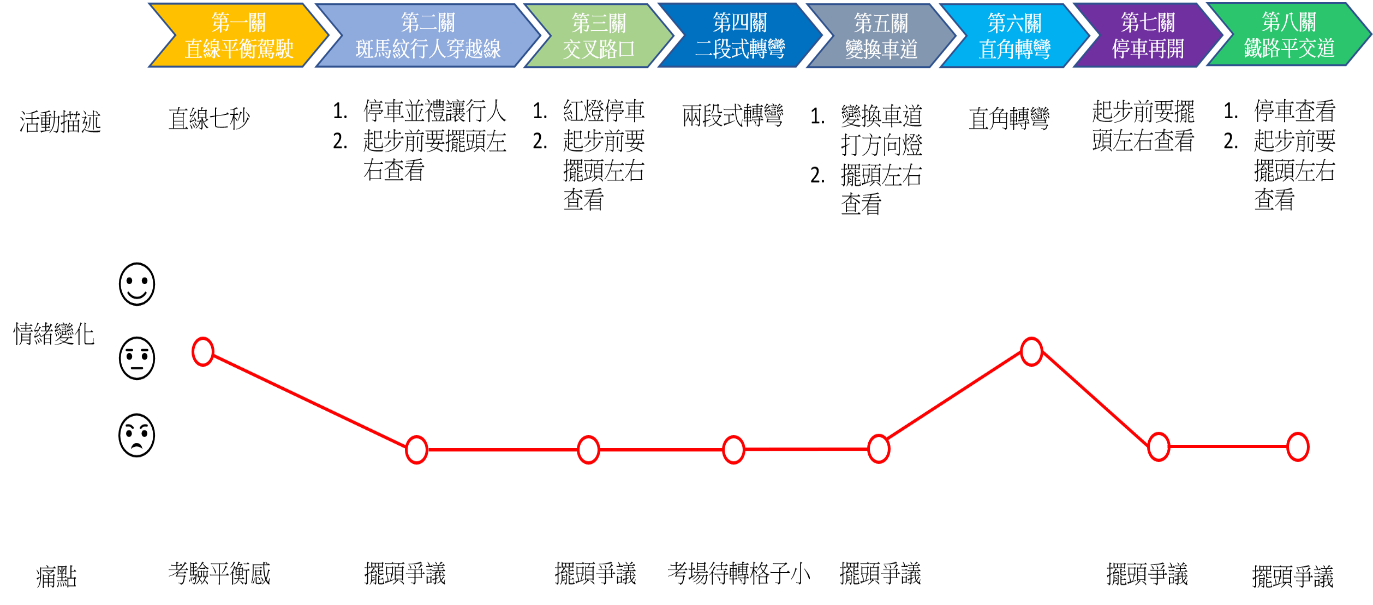
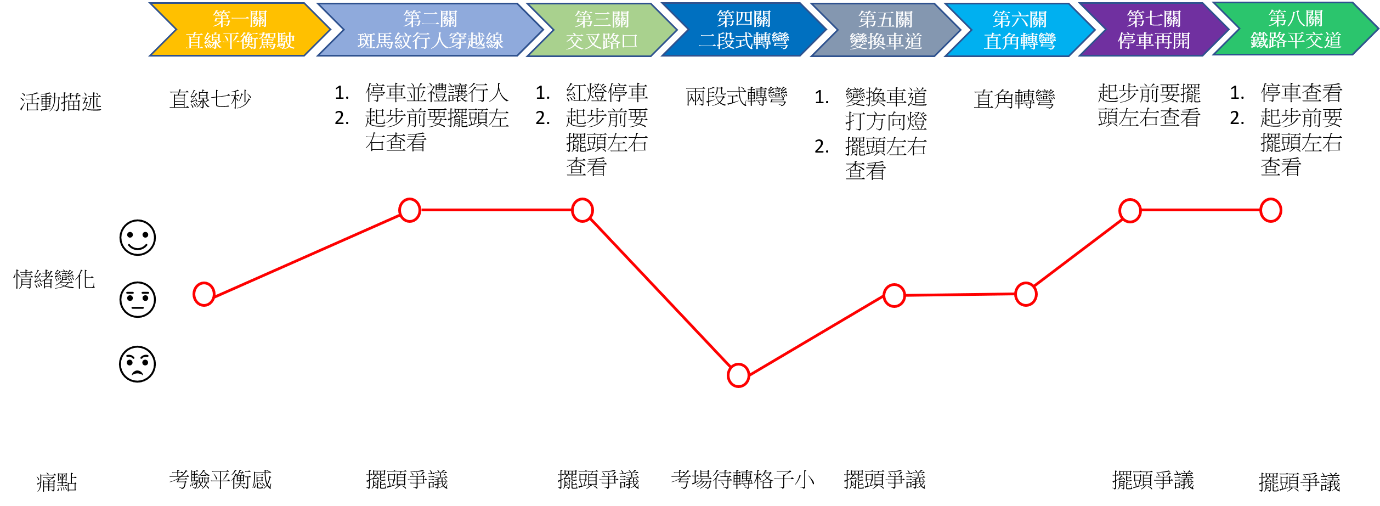
最後我們將駕駛執照考驗制度的關卡裡的痛點(擺頭爭議)可視覺化,藉由梳理雙方的接觸節點,以及使用者(考生)在不同階段的任務、獲益和痛點,來說明導入「AI機車路考擺頭辨識輔助系統」前後,對考生帶來的滿意度之影響。
成果影片:
參考資料:
Fxxkin genius!!
很棒的系統,開起來非常實用