
團隊名稱:NTUST_HISLAB
為提升自駕車系統的可靠度,即時以及能夠正確的辨識是系統非常重要的兩個指標。 所以提升車道線檢測任務在視覺線索不佳的情況的辨識能力,且搭配OpenVINO技術優化模型減少計算量,結合兩者後系統能提升幀數、低延遲的辨識效果,能夠為自駕車提供更優秀的穩定性。
提案動機
隨著人工智慧的時代來臨,AI應用於交通的例子可說非常廣泛,而在自駕車的安全性能發展中更是每個車廠都致力達成的目標,其中找出駕駛人目前所在車道是一項不可或缺的系統要件。
為提升自駕車系統的可靠度,即時以及能夠正確的辨識是系統非常重要的兩個指標。 所以提升車道線檢測任務在視覺線索不佳的情況的辨識能力,且搭配OpenVINO技術優化模型減少計算量,結合兩者後系統能提升幀數、低延遲的辨識效果,能夠為自駕車提供更優秀的穩定性。
解決方案
– 硬體
- Intel I7-11800H(內顯UHD Graphics)處理器
– 軟體
- VS Code、Anaconda、OpenCV
- Intel OpenVINO Toolkit
過程描述:
透過使用RGB行車影像,在Intel致力研發的OpenVINO Toolkit上進行車道線特徵萃取以及資料的後處理。利用加強的網路架構,來提升車道的辨識能力。即便在天色較暗、或者車道線有被遮擋的情況下,我們的系統仍能夠達到低延遲以及更加全局性的辨識效果,使自駕車技術對於駕駛及乘客的防護達到更高的安全性。
在成果短片中,可見即使有車道被遮擋,或著是光源昏暗的情況,系統都能準確預測出車道線,且使用了OpenVINO後的運算進一步提升。另外也進一步的對獲取到的車道線做後處理,如與車道的偏移量、壓線警告、車輛置中訊息等,提供更多的資訊給自駕車。
主要工作:
- 通過聚合切片特徵圖,在垂直和水平方向上循環移動切片特徵圖,使每個像素能夠收集全局信息。讓模型更好的預測出看不見的車道。
- 使用車道線資訊,進一步後處理,提供更多的資訊給自駕車做決策。
- 透過OpenVINO提升系統效能:加入OpenVINO後使原本龐大的模型體積減少一倍以上,辨識速度微幅提升!
系統架構分為四個階段,在模型推論的部份使用了OpenVINO加速:
- 第一階段首先輸入RGB影像。
- 第二階段對輸入影像做處理,萃取出車道線理應存在位置的特徵。
- 第三階段得到影像中車道線資訊後,對其做後處理,找到行駛中所在的車道,以計算車道中線,提供轉向資訊。
- 第四階段輸出結果影像。
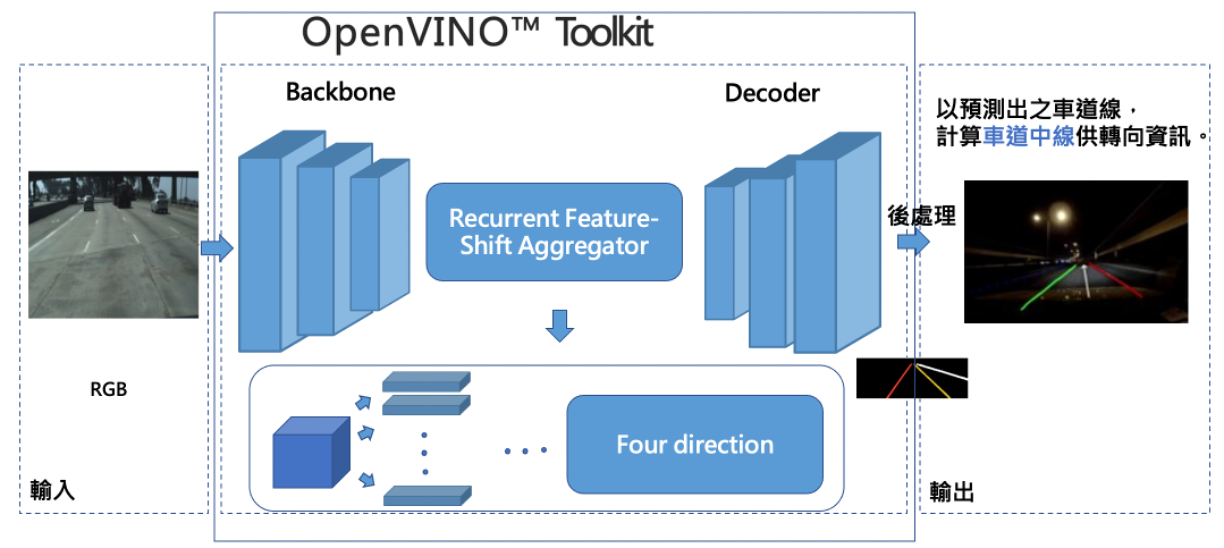
(圖一,NTUST_HISLAB-基於邊緣裝置之車道置中系統-架構圖)
成果介紹:
以下影片中詳細的敘述了本次 Intel® Distribution of OpenVINO™ Toolkit 競賽中NTUST_HISLAB團隊的:
- 背景解說
- 解決方法
- 成果展示
- 未來展望
成果介紹影片重點說明:
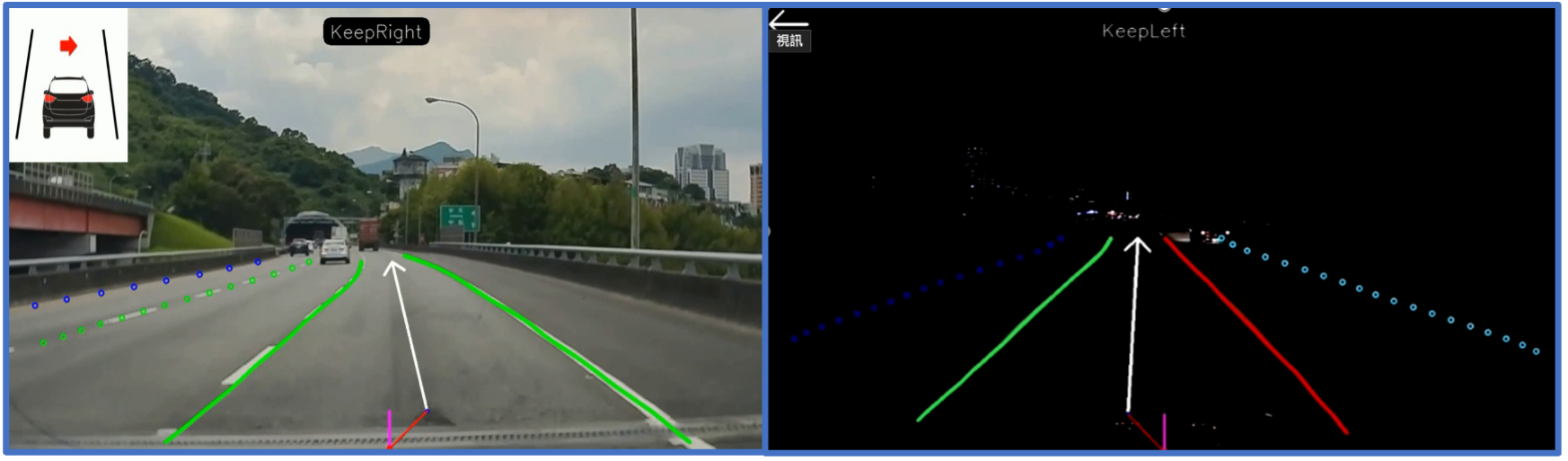
(圖一)白天(左)光線充足與晚上(右)光線昏暗皆能正確辨識。
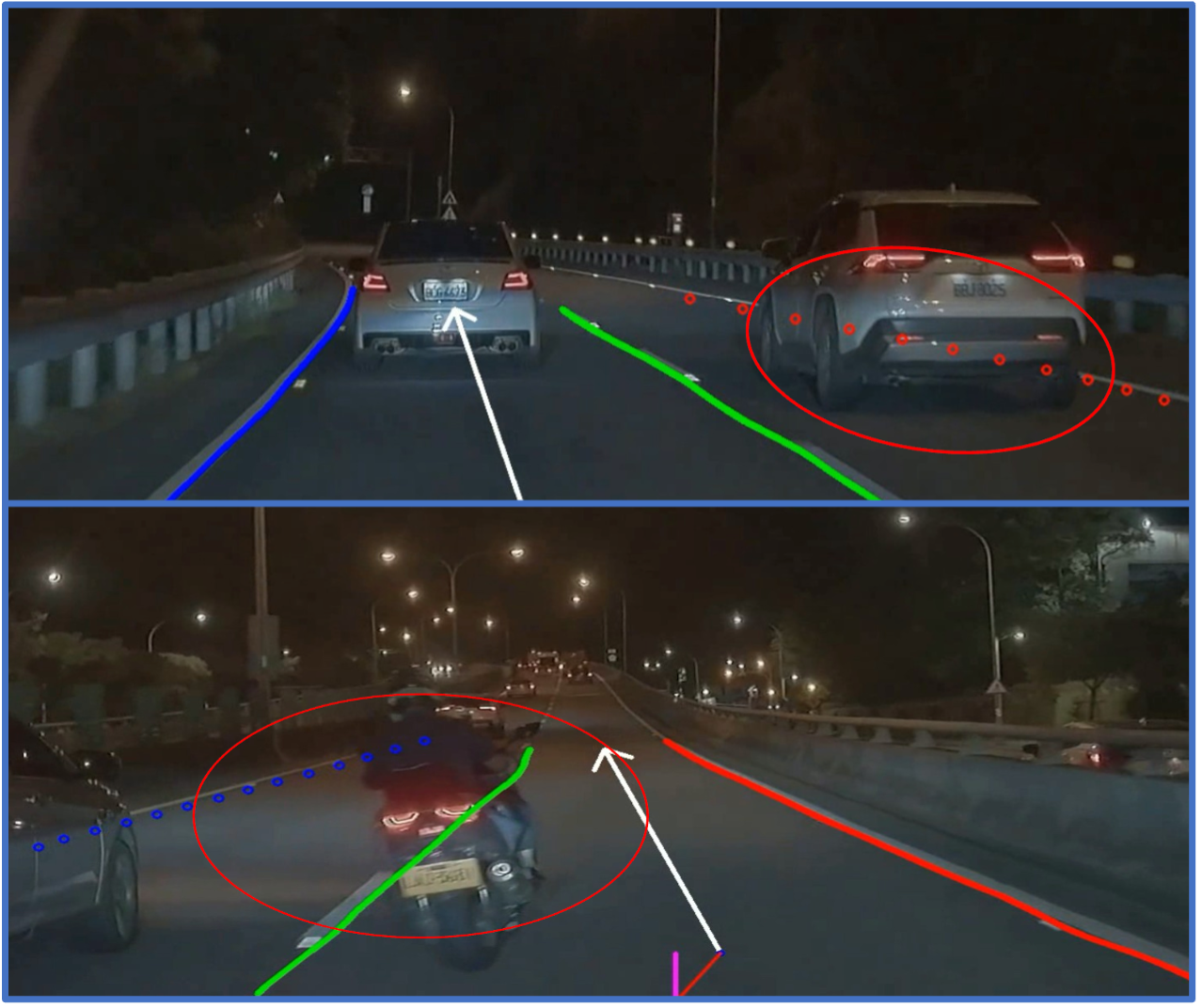
(圖二)被遮擋情況預測效果,可見紅圈位置視覺上被物件遮擋的車道,我們的系統可以很好的預測出來。
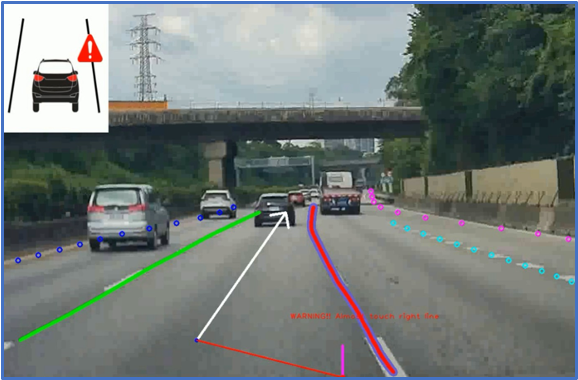
(圖三)車輛置中系統搭配UI,為車輛提供目前車道資訊,可以搭配決策系統去保持車輛行駛於路段中央,以免發生與其他車輛擦撞事故。
在本地端的CPU、GPU(Intel內顯) 進行了不同裝置的選擇,在還沒使用OpenVINO轉換模型前,本地CPU FPS小於0.5,如表一,而使用了OpenVINO優化模型後,採用FP16以及FP32的模型CPU推論速度比為轉換前提高了4倍,同時GPU的推論速度在優化後也比原先的GPU微幅提速。

結論
- 強化看不到的車道線特徵的網路架構,提升在車輛行駛時更全局性的辨識,極端氣候的情況下如夜間,或者車道線受到其他物體遮擋時,也能很好的預測車道。
- 計算車輛與當前車道的相關數據,即時的向自駕車提供有用的資訊,避免因車道偏移而造成擦撞事故。
- 利用OpenVINO,進一步優化我們的模型,使運算速度提升,日後應用在運算資源有限的邊緣裝置上可以獲得非常好的效果。
- 我們實際在汽車上架設RGB攝影機上路蒐集資料,有優良的資料才能訓練出高準確率的模型。而數據集為本團隊所有,資料的價值與模型良好的性能都使本團隊已在市場上取得優勢。
參考資料:
- OpenVINO官方網站
-
Recurrent Feature-Shift Aggregator for Lane Detection Tu Zheng, Hao Fang, Yi Zhang , Wenjian Tang , Zheng Yang , HaiFeng Liu , Deng Cai 本團隊由國立臺灣科技大學(電子工程系)陳永耀教授指導。
這個讚讚
很好👍
👍
哇好像不錯~~~
這是什麼酷東西~
This looks good!
棒棒的🙌🏻🙌🏻