")
參賽團隊名稱:智動化
機器人是製造業Top1生產利器,本案將無痛升級使之擁有視覺、聽覺、決策、自控能力,彈性應對製造難題。與OpenVINO技術整合大幅減少Edge Compute部屬成本,大幅加速推論速度且推論準確率未下降。
提案動機
- 在全球製造業中,許多成熟廠區的傳統工業型機器人都已有二十年以上的歷史。然而製造業最關心的事,就是要如期、如質、如量的將產品交付給客戶,而這三件事都離不開工業型機器人,在製造業中,它也是共通性最高的設備。如何將傳統工業型機器人從自動化進階成自適應,就是我們的開發構想。
- 過往當目標物或機器人點位偏移時,就會發生抓取錯誤,造成產能損失或產品異常,這已經是各產業的共同痛點。如何將傳統工業型機器人智慧化? 就是我們開發的精神。
- 我們希望Robot擁有視覺,能看見目標物位置;有聽覺,能輔助視覺盲點;偵測異音。更希望擁有思考能力,能提供全流程的風險評估;最後還需要有自主補正的功能。這就是我們的4大核心技術:開眼、長耳、決策、回控!
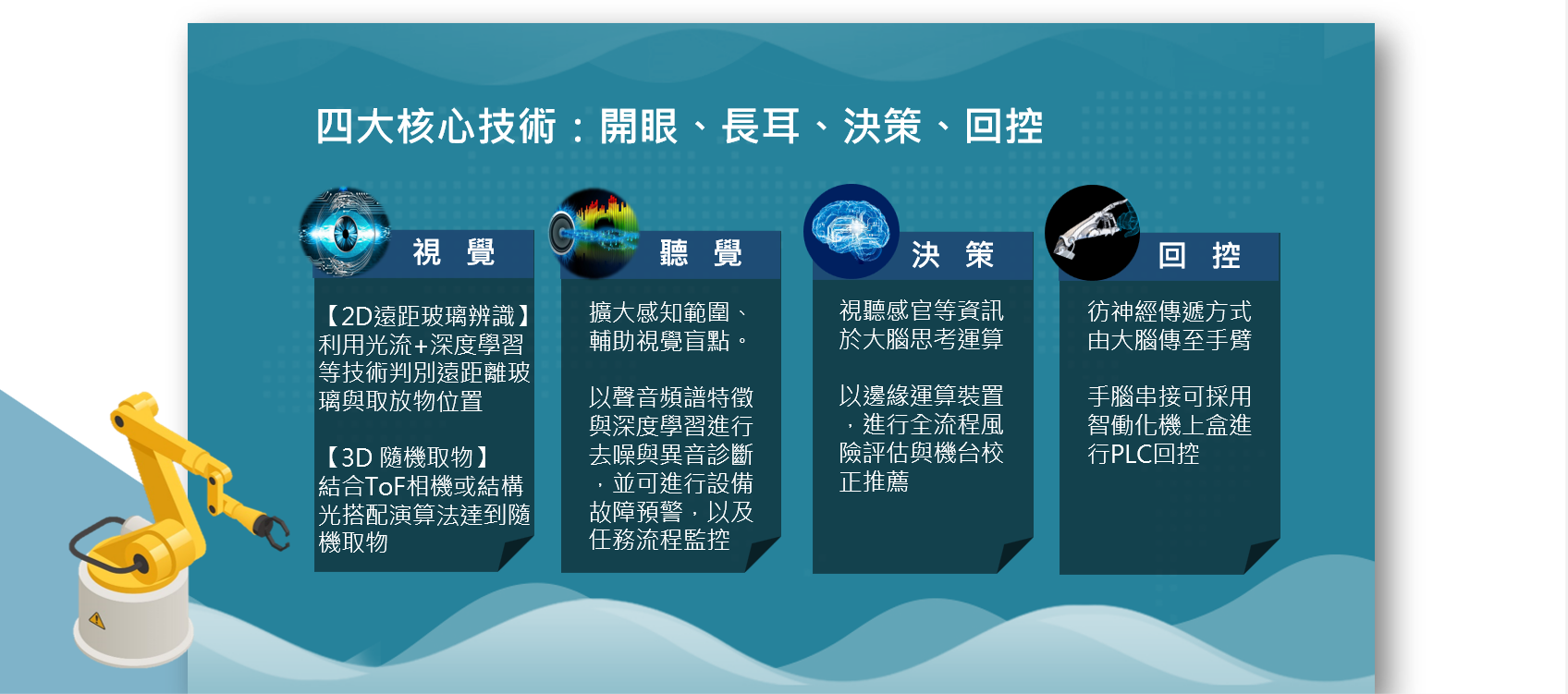
衍生自適應系統開發方向
解決方案
有別以往設備預警,本案做到了自感知異常.自適應補正,自決策推薦
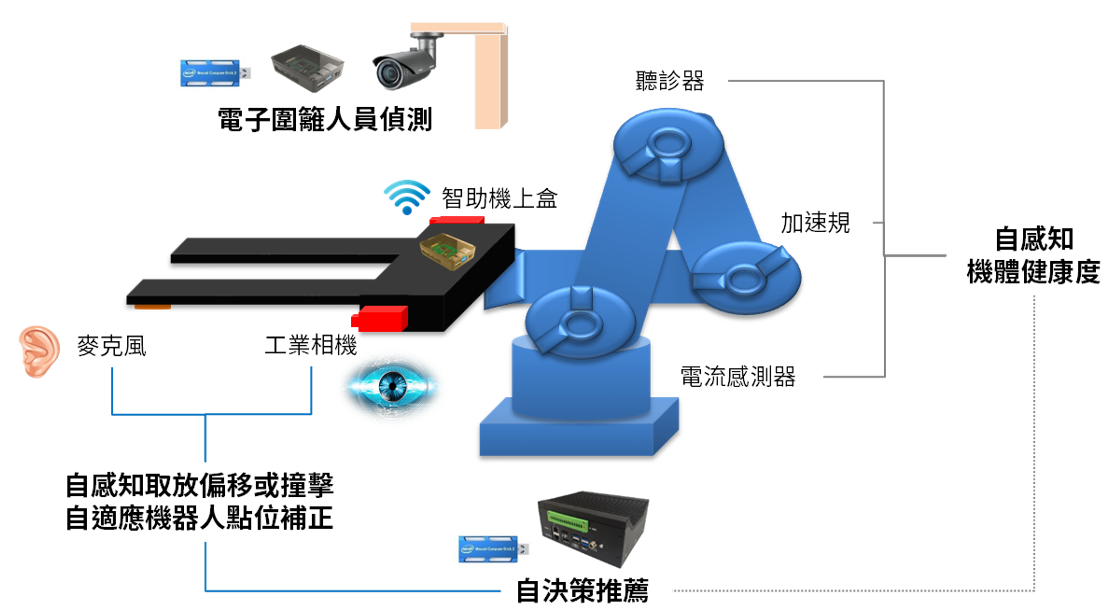
智慧機器人系統整合架構
本案達到自適應補正精度<0.5mm,可高泛用於各製造業的精密取放流程,根據AI診斷結果進行Robot回授控制,達到自適應補正任務,利用AUO自行開發SPIIDER進行資料收集含視覺聽覺等任務,結合物聯網與邊緣運算技術可與機台互動,根據SPIIDER訊號執行邊緣感知器收取訊號任務,並進行資料前處理,含訊號切割、特徵轉換、演算推論,達到自感知異常,自決策推薦。
智慧機器人技術架構
視覺系統計算後的資訊,能在察覺些微異常時主動通報user並告知詳細偏移狀況,此時Robot能自主調整,聽覺系統輔助視覺盲點偵測異音,並利用自行開發去噪模型進行環境噪音去除效果,可針對使用者需要判別的異常聲音進行偵測,綜合視、聽感官資訊後,我們也提供全流程的風險指數供user判斷是否該立即停機、或是待下次回廠保養即可等決策,搭配電子圍籬透過影像識別方式來進行判斷(人員進入)及管制(機台設備),於特定機台(Robot)進行減速或暫停,以提高人員安全!
開發使用軟硬體
硬體:
- ASUS UP Xtreme i12 Edge
- Acer PH315-55-74FV (Intel® Core™ i7-12700H)
- Raspberry Pi 4+Intel Movidius NCS2
- ADT SPIIDER智助機上盒
軟體:
- Intel OpenVINO™ Toolkit
- Python
成果
成果介紹短片
成果介紹
本案透過不同作業系統與不同Edge進行AI模型Depoly:
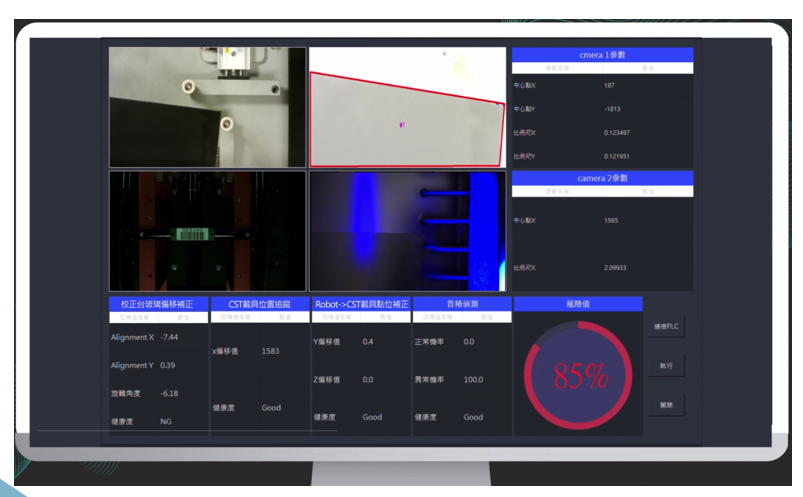
1.Acer PH315-55-74FV (Intel® Core™ i7-12700H筆記型電腦):
呈現視覺GUI畫面,NoCode平台介面供使用者進行視覺系統取像,OpenVino最佳化模型挑選,參數調整,設備回控交握,提供各視覺即時補正結果,設備全流程的風險指數。
2.ASUS UP Xtreme i12 Edge(AI開發套件):
呈現聽覺GUI畫面,NoCode平台介面供使用者進行音頻頻取,設備回控交握,OpenVino最佳化模型挑選,異音即時偵測結果。
3.Raspberry Pi 4+Intel Movidius NCS2:
使用Intel OpenVINO™ Toolkit預訓練模型,透過影像識別方式進行電子圍籬即時進行判斷(人員進入)及管制(機台設備)。
整合介面呈現
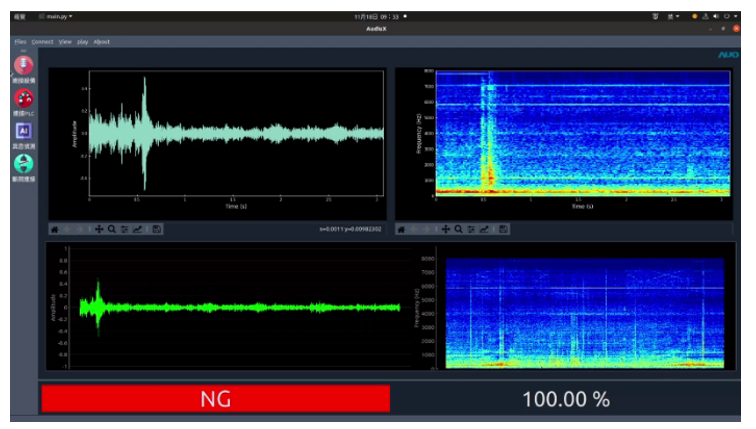
聽覺介面呈現

電子圍籬介面呈現
團隊自介
智動化團隊來自友達光電龍潭廠,團隊致力於使用人工智慧連結高度自動化技術,應用在智慧製造的數位轉型團隊,提供製造業各類型解決方案,於2022獲選哈佛商業評論 & SAP 第二屆鼎革獎 【智慧製造楷模獎 & ESG特別獎】與美國製造協會「永續發展與循環經濟」最高成就肯定。
團隊成員經歷AIA第二期新竹經理人班, AIA第三期新竹、第三、七期台北技術領袖班,從發想、開發、落地實現都積極的密切討論如何將此方案可以更符合現場的痛點解決,此作品我們也於內部場域實際運用並得到不錯的成效,也期望能夠對於其他製造產業有所幫助,且有了搭載Intel CPU Edge Device和OpenVINO的加入,提供了我們作品更快速的推論、高性價比的Edge Device、快速的落地平展於各個站點,本團隊也有幸透過此競賽激發不同的想法與應用,最後也期望與不同產業的先進們互相交流讓此作品能獲得更多的運用與持續改進。

智慧製造楷模獎 & ESG特別獎
參考資料
ADT SPIIDER智助機上盒
Really helpful for manufacturing , so good
GOOD
還行
Good 👍
優秀
nice job!
Good!
讚喔!
讚!
讚