")
參賽團隊名稱 : We Care 路況
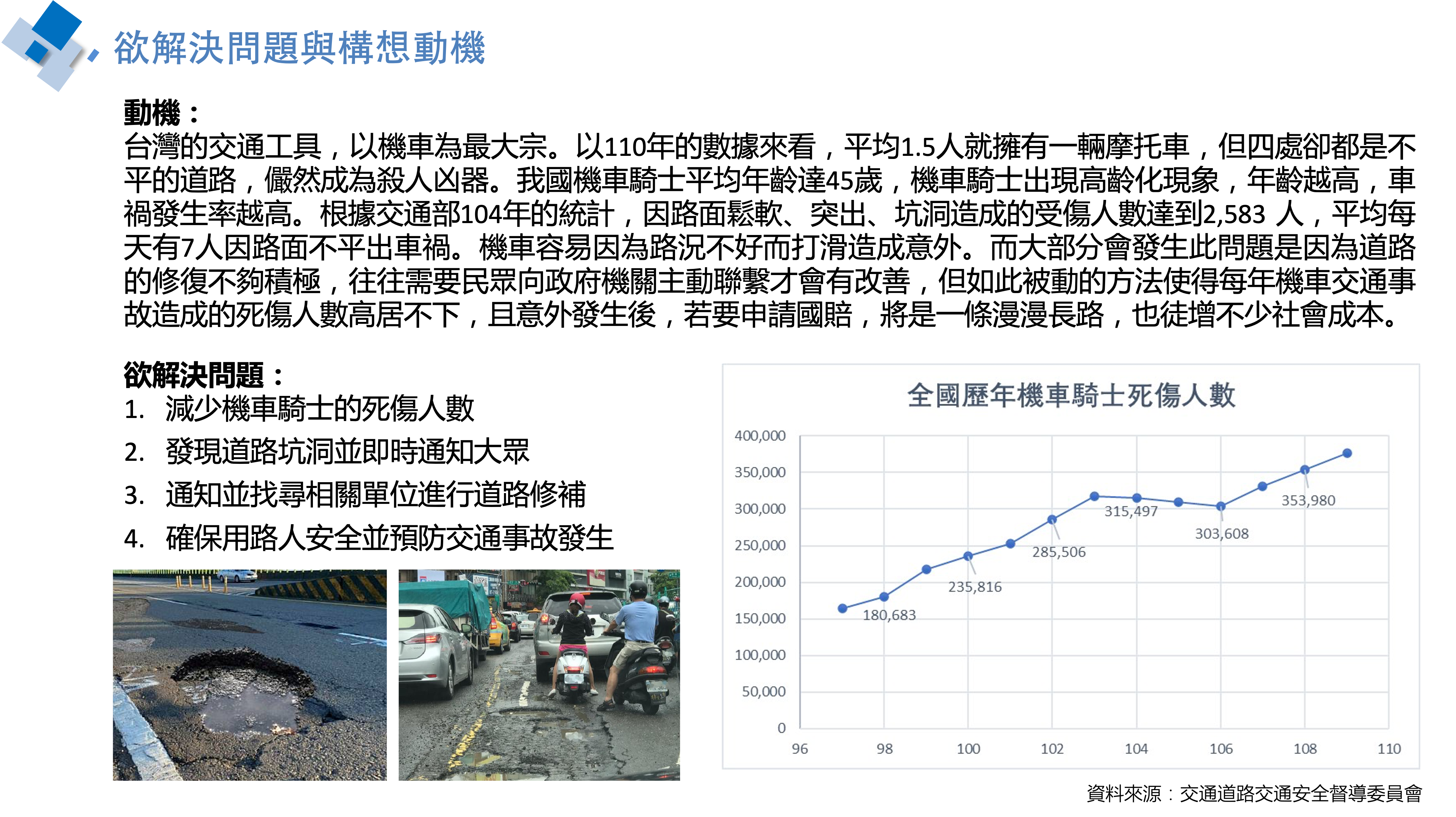
提案動機
本提案為「路見不平,AI 相助」,發想自長久以來懸而未解的路面坑洞造成的交通事故,期望透過深度學習模型來辨識路面坑洞,將資訊即時傳送給公益平台用戶端及相關單位,除了能在最短時間內通知相關工程單位外,亦可即時讓平台使用者掌握路面平整相關資訊,有效降低因坑洞造成的事故率。此外,公益平台將建構完整商業模式,在資訊安全有保障的狀況下收集行車之大數據資料,並透過大數據分析提供合作伙伴制定商業策略,在降低交通事故之餘,亦能兼顧平台營運、有效增加合作伙伴商業效益。
解決方案
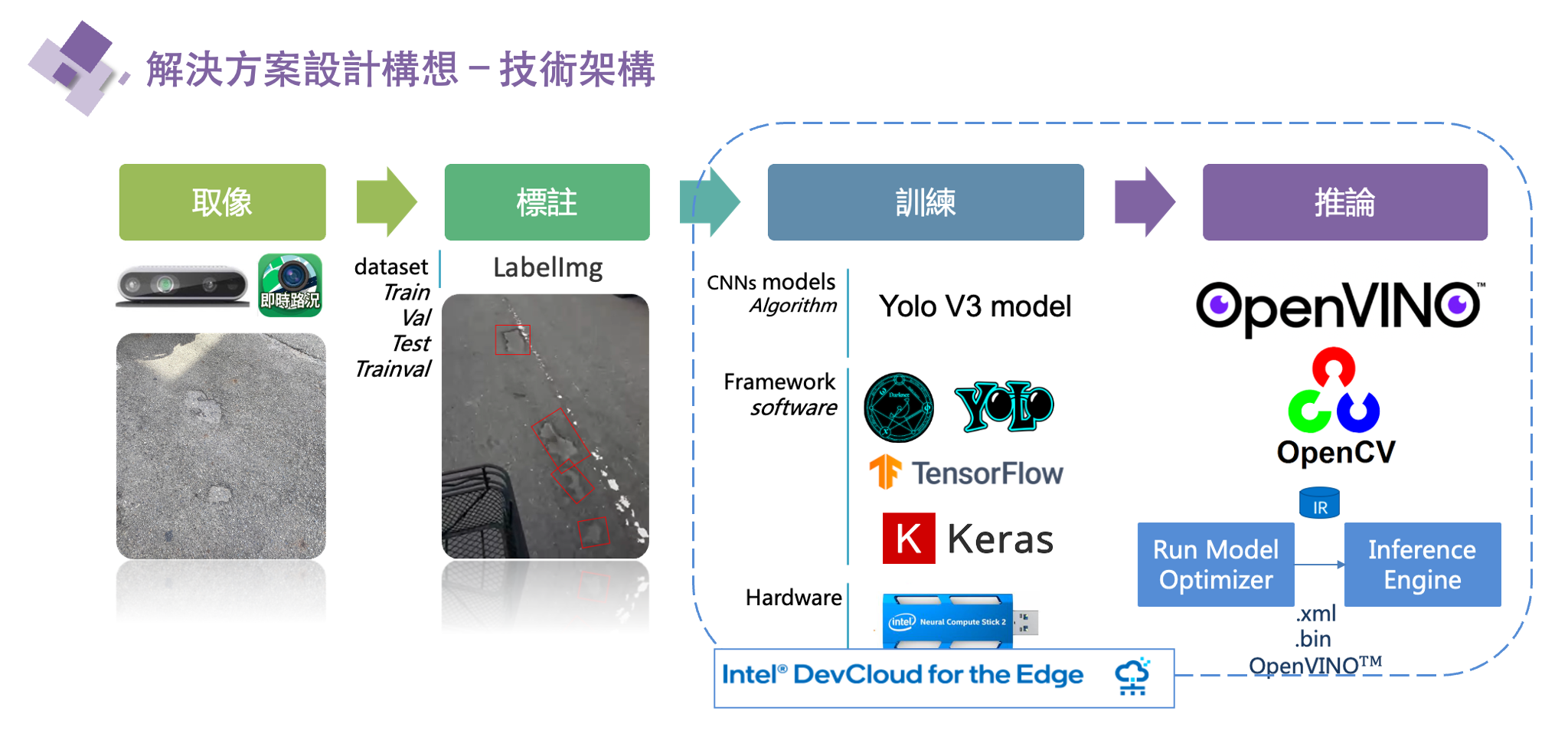
系統環境:
- YoloV3
- Intel® DevCloud for the Edge
- Intel® OpenVINOTM Toolkit
根據公路養護作業手冊,柔性鋪面損壞型態之隆起、沉陷及坑洞是我們想使用視覺辨識的目標,我們會透過DevCloud平台及內建的OpenVINO工具包對使用者提供之行車記錄器影像或直接上傳照片進行視覺辨識,再針對分析出的結果向平台及案件承包商發布資訊,即時且有效率的解決道路不平問題。
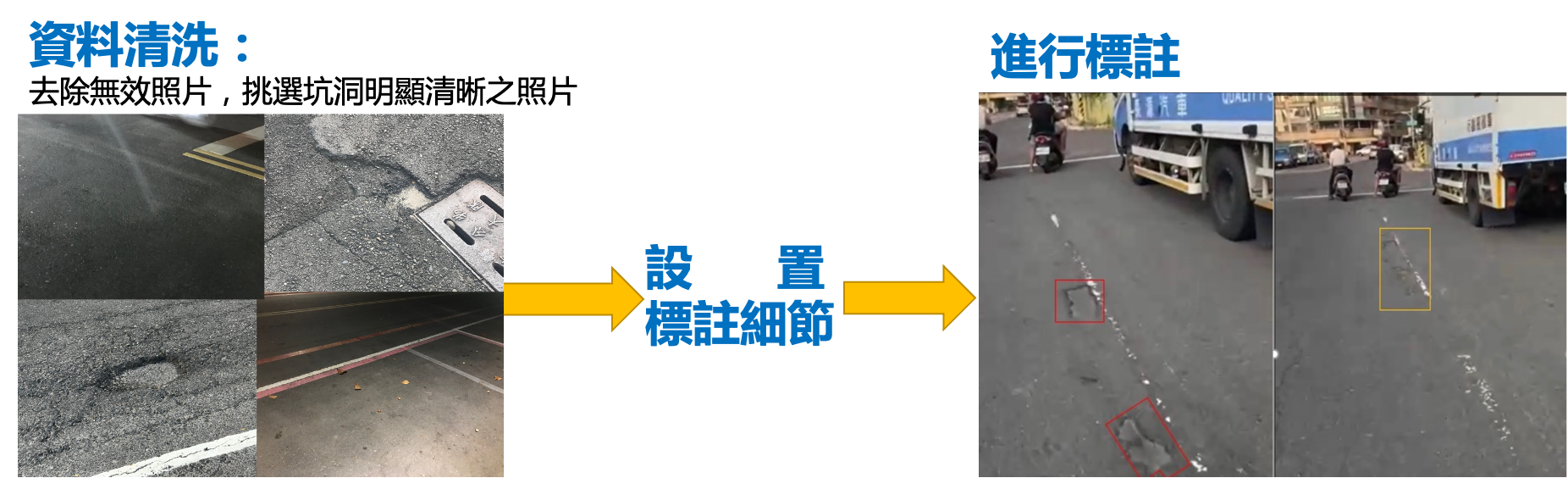
本提案是仿造構想落地化之後的方式,以機車行車記錄器錄製並分析影片。首先進行標註工作,以下為本提案進行標註之流程。首先針對收集到的所有照片進行資料清洗,將具有明顯且清晰坑洞的照片挑選出來後共有450張可進行標註用,接著進行標註的細節設置(lable),設置完成後即可進行坑洞標註,進行模型訓練。
本次競賽模型架構使用Tiny Yolo V3對物件進行偵測,再透過Intel DevCloud OpenVINO做最佳化,進而提升我們模型的效能及正確性,以下即為本提案中從取像到模型推論之流程圖。
我們將使用者回傳的道路影像進行前處理及GPS定位,再將處理後的資料導入模型對路面坑洞進行偵測,最終將偵測的正確性及GPS座標存入資料庫於前端地圖同步顯示,讓我們平台的使用者可以即時同步道路坑洞資訊。

成果介紹短片
成果介紹
模型成果:
在我們開啟OpenVINO的狀態下,不僅能使Yolo V3辨識有更高的FPS,也能大幅度降低我們CPU的使用量,使系統能多工將辨識結果存入資料庫及傳上雲端,更重要的是,CPU使用量的下降也意味著我們的系統面臨崩潰機率會降低以及能源使用量的下降,藉此提升了系統的穩定性。

最後,模型訓練完成後,本提案的模型辨識率高達87%,能有效且快速地辨識路面坑洞。

商轉可行性
透過我們設計的平台介面,使用者蒐集道路影像並回饋紅利點數,使我們的系統能更完善的辨識所有道路坑洞;與各大企業合作引入維護平台資金,企業能藉此打響知名度與實現企業社會責任(CSR);與政府和修補馬路的單位合作,透過我們提供的模型辨識道路坑洞地圖,加速修補馬路的施工作業。如此一來對於參與我們計畫的各方都是有利無害的,也能使道路問題備受重視,在社會上產生正向的循環。
此外,會員可參與平台活動拿獎勵,查詢帳戶內的相關資訊。APP提供了即時動態,讓大眾了解路況及補路專案的募資進度。平台上還有特約商店的資訊,讓用戶隨時查隨時買。透過金流與資訊流的循環,我們的平台可以體現數據價值,達到自給自足的商業模式。
